| TEAM 3 |
6.270 - Autonomous Robot Design Competition - IAP 2005 |
Home | Strategy | Design | Code | Results | 6.270
The Strategy
There are several key components in our strategy. Here is a quick breakdown of what we tried to do:
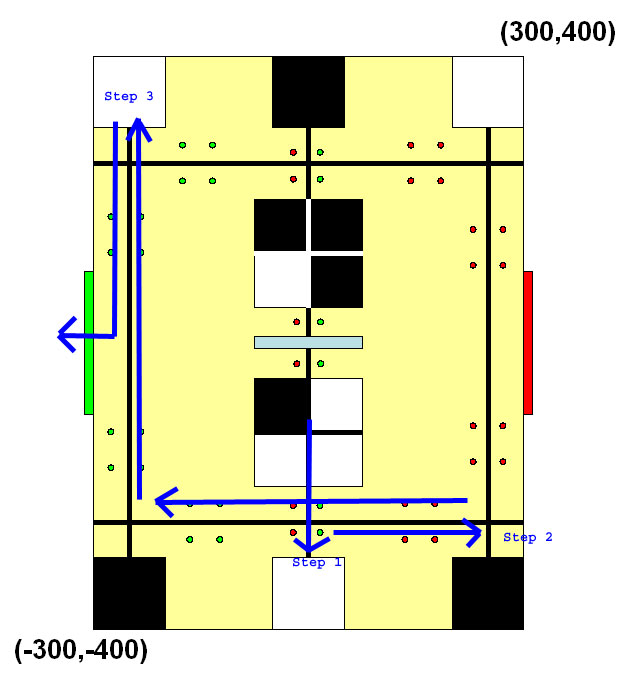
1) Get some points quickly - It is important to realize that a robot will automatically lose if it doesn't do something positive for the team (that is, make the opponent lose points or score points). Because no hardware is 100% reliable, it is important to quickly score at the beginning of the round, therefore if the robot fails, there is still a chance of winning. We accomplish this by immediately orienting the robot towards the group of two red and two green balls and pushing them into the nearby scoring area by simply moving forward. This guarantees two points, because the winning color is worth two points each and the losing color is worth negative one point each. If our robot were to fail afterwards, we would at least defeat any placebos (robots that don't do anything), or poorly programmed robots that fail to accomplish much. Also, if the opponent does the same thing, there would be a double win because both sides have 2 points.
2) Avoid the other robot - Everybody loves to watch a collision, except when it is your robot that is involved. It is very difficult to successfully recover from a collision because it is difficult to know where the robot is and what direction it is facing after a collision. There are also many other circumstances, such as getting stuck against a wall, getting stuck to the opponent, and physical damage. While it is possible to recover using the RF signal and gyroscope, it is safest to not collide at all. After scoring the initial two points as described above in step one, our robot will try to detect what color balls the opponent is trying to get by finding out which side they are current at by using the RF signal. Our robot will quickly grab a group of balls from that color, because the opponent should not be at our side of the field yet, and then avoid the other robot by collecting the opposite color of balls that the opponent was going for. If executed correctly, our robot should have more balls than the opponent because we stole one group of balls that they intended to get and we took all the balls we wanted.
3) Put balls into scoring area and voting - Our next step is to place the balls we collected into our scoring area. Ideally, we would have 3 groups of balls of one color and another group of balls of the opposite color (the one that the opponent is trying to get). We would place the 3 groups of balls into our scoring area and then attempt to vote for that color with the other 4 balls. Note that this is a risky strategy because we may get hit by the opponent robot before we can vote. In that case, we might have accidentally gave ourselves negative points if the current vote does not favor us.