Design
Design
Jebus has needed the ability to do a number of things, each of which is demonstrated by specific parts of the robot.
- Drive
Many parts of the robot go into its ability to drive. For our first assignment, we were asked to build a simpler robot with a limited number of functions. Its main function was the ability to drive.
- Our first attempt:

This unfortunately was too weak to support the batteries and handyboard. - So we tried something else. A little more vertical this time...
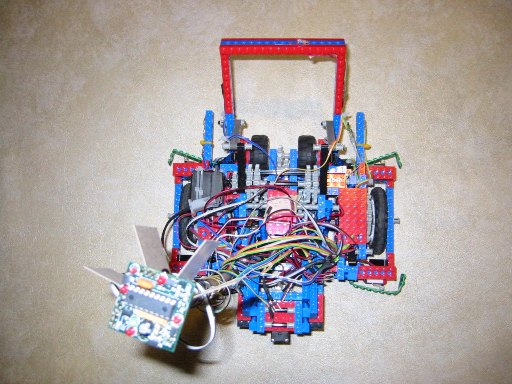
This didn't work well either. But we learned a few techniques that wouldn't work in the process. - Jebus was much more capable of driving.
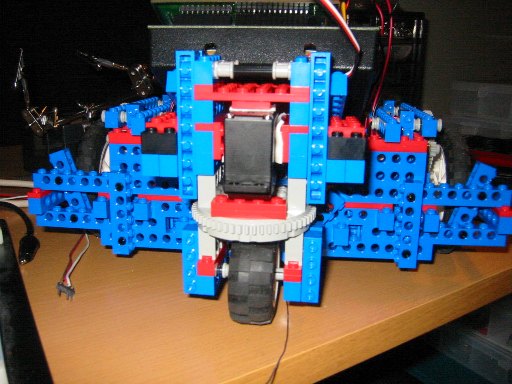
It had two drive wheels, each with sexy 45:1 gearbox:

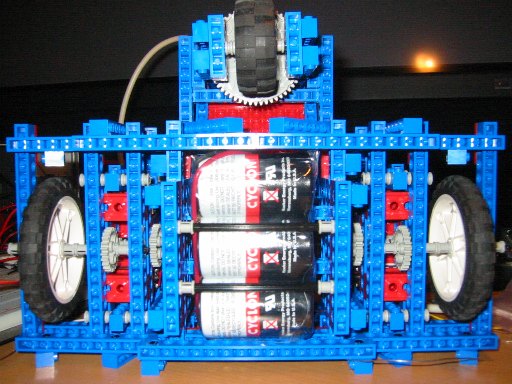
And a servo-controlled steerable wheel in the back:
- Our first attempt:
- Manipulating Balls
Our robot needed the ability to move balls in order to drop them over the edge or place them into the lava island.
- One idea was to use a mechanically actuated claw:

But it didn't work... - Then our plan was for Jebus to be able to push a ball over the edge of the table or into the lava island by
producing a little lift on the ball as it drove forward. One implementation was to use horizontally mounted tread to lift
the ball. But in the end we just used two elevated tires:

- We still needed a way to trap a ball to move around. So we mounted a servo-actuated arm that could move up and down to grab
and release a ball.

- In order to enable the robot to find and trap balls, a great deal of specialized sensors were used:
- Two distance sensors - used to detect when the robot was facing a nearby ball.
- A bump sensor - a failed attempt at sensing if a ball was within the robot's grasp. The sensor required a situation that was two precise to reliably trap the ball. The bump sensor was also delicate and easily breakable, so it was removed.
- Two IR detectors/LED pairs - one mounted on the outer arms to detect when a ball was within grasp, and another mounted on the movable arms to confirm that a ball was captured.
- A phototransistor and LED - mounted on the movable arms to identify the color of a captured ball.
- One idea was to use a mechanically actuated claw:
- Other features
Our robot had many other requirements to make it generally solid.
- Our robot was braced extremely well, enough to pass the strictest drop test...
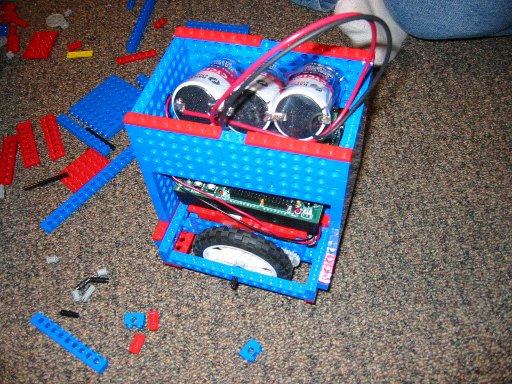
- Our battery was mounted on the underside of the robot in order to give it a low center of mass:
- We used altered pieces of baseplate in conjunction with bump sensors to detect collisions between the corners
of the robot and the walls of the playing field.

- We used cardboard to help make the IR beacon more accurate at close distances...