 Iron Chef is the name of the robot we built for the MIT 2001 6.270 Autonomous Robot Design Competition.
We chose the name Iron Chef for our robot because despite the obvious differences, we saw a lot of similarities between the 6.270 competition and the Iron Chef TV show featured on the Food Network.
Iron Chef is the name of the robot we built for the MIT 2001 6.270 Autonomous Robot Design Competition.
We chose the name Iron Chef for our robot because despite the obvious differences, we saw a lot of similarities between the 6.270 competition and the Iron Chef TV show featured on the Food Network. The design for the first version of our robot essentially consisted of a cube with two compartments on each side controlled by gates.
Each compartment is tall enough and wide enough to allow the 4-inch diameter balls to pass in.
The robot is driven by a differential drive since that is by far the easiest to implement and the most useful for this application.
When the robot moves over a ball, a sensor in the tunnel will detect the ball within a compartment and close the appropriate gate.
When the robot moves, the ball will roll along with the robot.
In order to minimize friction as the balls roll under the robot, the walls and gates of the compartments have freely rotating wheels.
The design for the first version of our robot essentially consisted of a cube with two compartments on each side controlled by gates.
Each compartment is tall enough and wide enough to allow the 4-inch diameter balls to pass in.
The robot is driven by a differential drive since that is by far the easiest to implement and the most useful for this application.
When the robot moves over a ball, a sensor in the tunnel will detect the ball within a compartment and close the appropriate gate.
When the robot moves, the ball will roll along with the robot.
In order to minimize friction as the balls roll under the robot, the walls and gates of the compartments have freely rotating wheels. We implemented a differential drive system in this version using a very unique adder-subtractor transmission system.
The adder-subtractor allows us to control the robot more easily by making one motor control forward/backward motion, and another motor as left/right motion.
We implemented a differential drive system in this version using a very unique adder-subtractor transmission system.
The adder-subtractor allows us to control the robot more easily by making one motor control forward/backward motion, and another motor as left/right motion. Adder-Subtractor Gearbox |
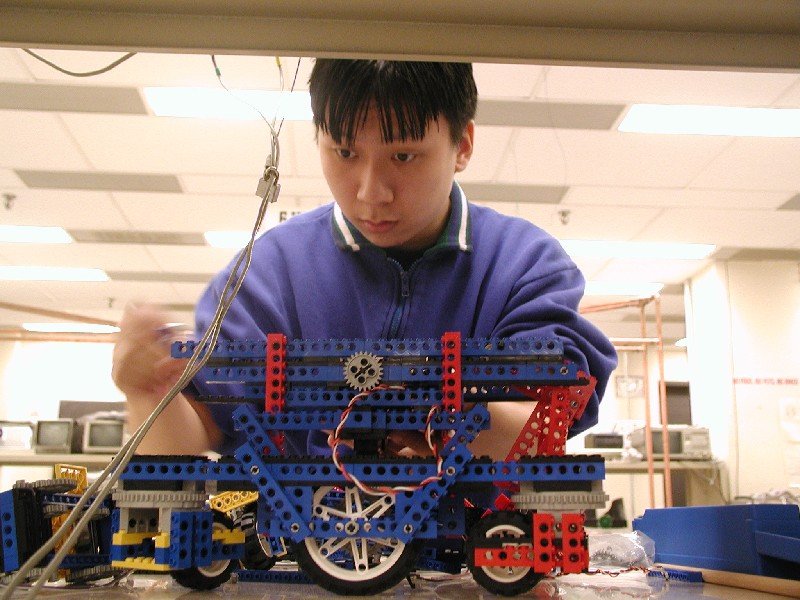 Clyde Working on Iron Chef v1.0 Thanks to the 6.270 staff for taking this picture |
 Our Lucky Headless Lego Guy |
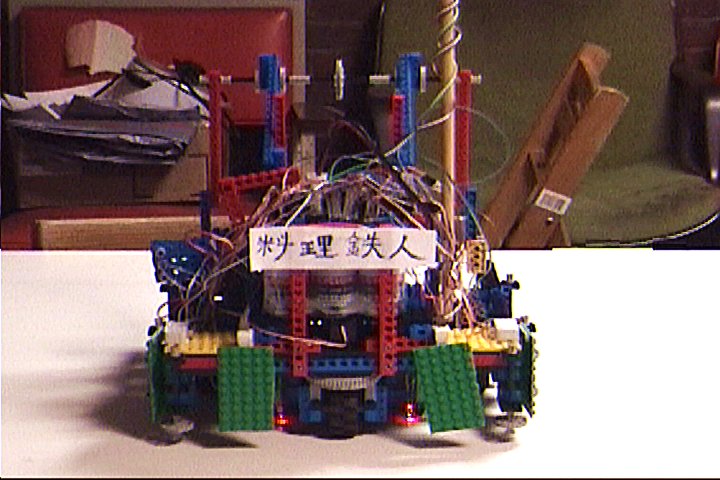
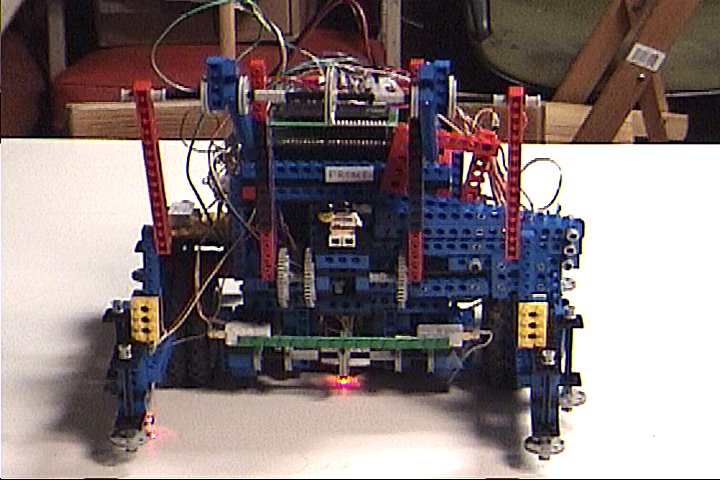 Front View |
 Rear View |
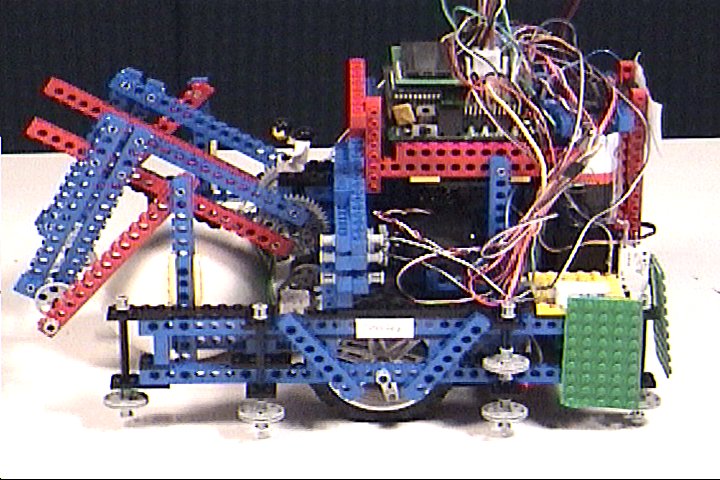 Side View, Holding a Ball |
 Arm Extended |
 This match was against Team 10 - Don't Worry, the team that won the entire 6.270 competition undefeated.
Unfortunately, that means we lost this round.
This match was against Team 10 - Don't Worry, the team that won the entire 6.270 competition undefeated.
Unfortunately, that means we lost this round. We won this round 4-2 (the announcer said 3-2 in the video, but there was a ball he didn't see).
Our opponent, Man at Arms, was essentially a stationary robot that quickly caged the middle ball, in addition to providing a ramp for further balls to drop down onto their side.
Apparently, they had some trouble after their ramp/cage was deployed.
For some reason, the cage began moving backwards onto our side after our arm had hit it.
In effect, they gave the middle ball to us and the ramp that was central to their entire strategy did not work anymore.
We were able to grab one more ball from their side as well, giving us a clear victory.
We won this round 4-2 (the announcer said 3-2 in the video, but there was a ball he didn't see).
Our opponent, Man at Arms, was essentially a stationary robot that quickly caged the middle ball, in addition to providing a ramp for further balls to drop down onto their side.
Apparently, they had some trouble after their ramp/cage was deployed.
For some reason, the cage began moving backwards onto our side after our arm had hit it.
In effect, they gave the middle ball to us and the ramp that was central to their entire strategy did not work anymore.
We were able to grab one more ball from their side as well, giving us a clear victory. We won this round as well, owing to another problem with the opponent.
Apparently it appeared as if the opponent oriented itself incorrectly at the beginning of the match, causing it to get stuck at the very beginning.
Thus, our robot was able to knock the center ball onto our side and proceed to the first ball on the opponent's side.
On the way back from the opponent's side though, it got stuck against the wall on its right, much like in Round 1.
For some reason, the side rollers that we had added in Version 3 failed to help glide us out of the predicament.
We never got the opponent's first ball out of their side, so we won with just the center ball, 3-2.
We won this round as well, owing to another problem with the opponent.
Apparently it appeared as if the opponent oriented itself incorrectly at the beginning of the match, causing it to get stuck at the very beginning.
Thus, our robot was able to knock the center ball onto our side and proceed to the first ball on the opponent's side.
On the way back from the opponent's side though, it got stuck against the wall on its right, much like in Round 1.
For some reason, the side rollers that we had added in Version 3 failed to help glide us out of the predicament.
We never got the opponent's first ball out of their side, so we won with just the center ball, 3-2. This was the round that we lost and finally got us eliminated from the competition.
The robot began as usual, successfully knocking the center ball to our side.
However, right after it did that, it immediately closed its gate and started moving backwards.
This was the round that we lost and finally got us eliminated from the competition.
The robot began as usual, successfully knocking the center ball to our side.
However, right after it did that, it immediately closed its gate and started moving backwards.Round 2 (11.8 MB) This video features a very confused Jackie thinking we were the other robot |
Round 3 (11.3 MB) |
Round 4 (10.7 MB) |
Round 5 (11.9 MB) |
 Be sure to check out Lego Chef, a spoof of the Iron Chef TV show on the Food Network, featuring your favorite Lego figurines.
Be sure to check out Lego Chef, a spoof of the Iron Chef TV show on the Food Network, featuring your favorite Lego figurines.