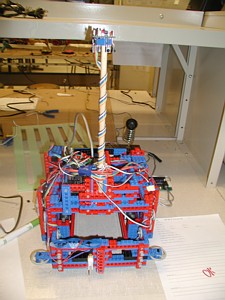
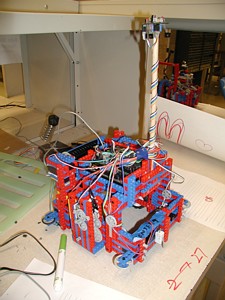
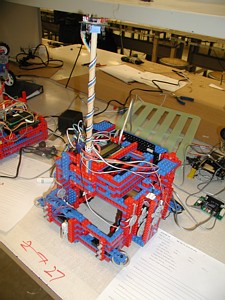
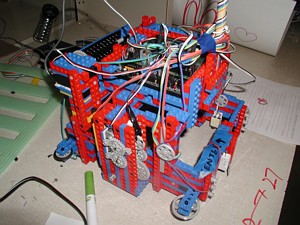
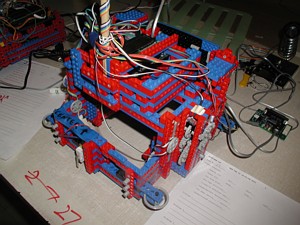
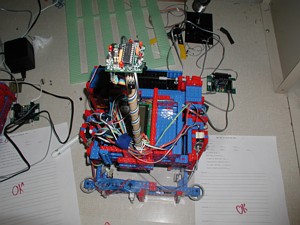

The members of team 27 are Amay Champaneria, Mark Cappellari, and Tim Nolan. We named our robot "Boxbot" for many reasons, one of which being that it looks like a box.
Our strategy for scoring points in the contest is to grab the opponent's balls repeatedly.
The four notable aspects of our robot were the drive mechanism, ball-containment mechanism, navigation system, and orientation method.
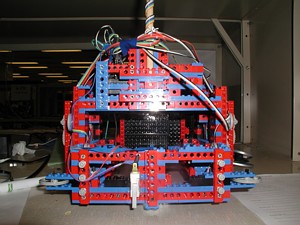
Drive MechanismTo simplify driving, we decided to go with a differential drive system. It consists of two independently driven wheels arranged side by side.
Ball-Containment MechanismThis is a fancy name for our garage door, which prevents the balls from rolling out of the robot when driving downhill.
Navigation SystemTo find its way around the table, our robot follows the walls with its arrangement of 3 distance sensors.
Orientation MethodIn the beginning of the match, our robot uses the IR beacon to determine where the opponent's robot is. Based on this information, it turns toward the opponent's territory and starts driving.
We qualified for the competition and won our Round I match in a double-win. Then we lost our Round II and III matches to robots that were obviously superior to ours.
| |
| |
| |
| |