The Bot

The very base of our bot consists of the baseplate with tires mounted sideways beneath the plate, both for elevation and for friction. Four light sensors (LED + photoresistor) are mounted to the baseplate for orientation purposes.
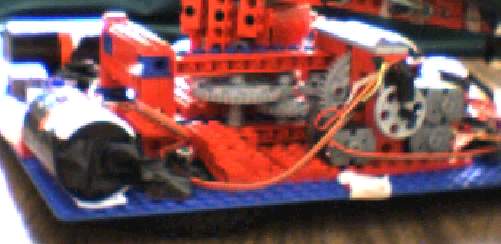
Above the baseplate, there are several batteries, sensors, and random legos put on the baseplate for simple weight purposes. (The heavier the base is, the less likely it is to move.) Also, there is the base gear train that swings the main arm, which consists of three motors geared down 1800:1 turning a turntable.
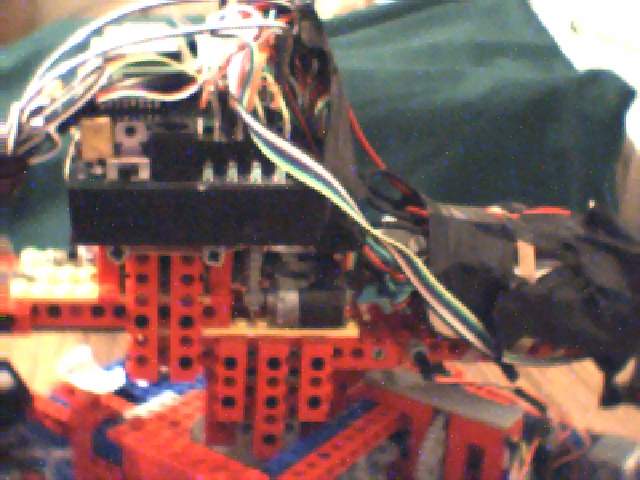
Next is the primary arm itself, which is bent into three parts. The first part is mounted directly on the turntable and supports the HandyBoard, the batteries, and the IR beacon.
At the appropriate time, two motors--aided by ten rubber bands--deploy the second half of the arm from its initial folded position to a horizontal position.

When the second part of the arm reaches horizontal, gravity causes the third part of the primary arm to fall. The third part of the arm consists of a heavily braced (with a tire as shock absorber, no less!) wedge to deflect falling balls, which covers a gear train which allows the entire arm to sweep back and forth.

Also mounted to the third part is a secondary arm, which extends across the arena to block the other robot, rolling balls, etc. It extends by means of a servo and has a tire on the end to provide friction with the far wall of the arena. Fully extended, our robot is 51 inches long--long enough to block the entire width of the arena.
Overall, we did not need many sensors at all--we used a photoresistor to sense the starting light, four LED/photoresistor combinations to orient based on the colors beneath the bot, two more LED/photoresistors to detect the color underneath the main arm in order to keep the wedge directly in the center of the platform, and two push-switches to tell when the main arm has deployed. Aside from that, our robot had no real need to know anything else, beyond a shaft encoder to tell how far it has turned before deploying the arm...
Main Page