Don't Worry, Be Happy.
Team MembahZ:
Fred Lee, Course 6-1 Senior. fslee@mit.edu
Likuo (Brian) Lin, Course 6-3 Senior. brianlin@mit.edu
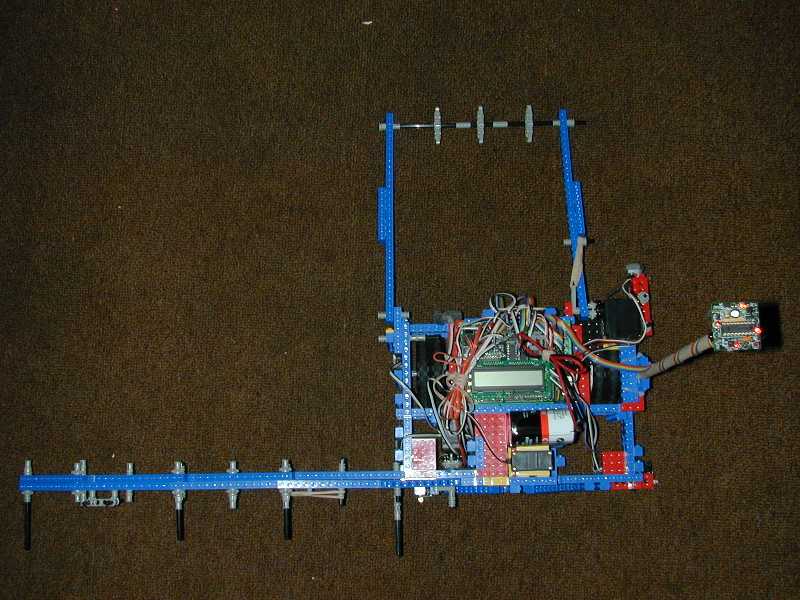
This is our Robot. We called it Don't Worry.
This year, 6.270 decided to implement the game, "Masters of the Universe."
Check out their webpage, and also poke around to see the cool robots in their
archives, too!
Facts:
We took apart and rebuilt our robot 3 times. The very first lego part we built was an extendable arm. We never voted (in our 2 person team) to remove that in any future design in our robot. Our gear train, however, kept changing. Our very first idea for a robot was to be a "plopper," as in, a robot that would fight for the center. We were thinking of a gear ratio of something like 500:1 so that we would have torque, and be able to plow through anything else that was in there, kind of like the robot that was built this year, called 1024:1 (they had a gear ratio, we are assuming, of 1024:1). We had also thought of making a robot that would drive across the entire board, and take the center, kinda like a few of the other robots that were built this year. However, we came to realize that, if somehow we were fast enough, then we wouldn't have to worry about all the other cases out there; the game would be over in the first few seconds. So, we made the massive (and painful) decision of making a "non-car" robot, to a "car robot" that needed to have a real geartrain, turning mechanism, and feedback to drive straight and stuff. So, our first robot was a car. We had a servo mounted on a 3rd wheel, and had a gear ratio of 54:1 with 3 motors on each wheel, while using the medium drive wheels. We went pretty slow, but we could drive straight, by pulse-width modulating the two motors, as we counted the counts on the encoders on each wheel (in addition to keeping straight with the 3rd wheel). But we were not totally satisfied with the speed and stuff, so we decided to rebuild again. So the second robot we built, we had a gear ratio of 27:1, we took off the shaft encoders, and put on a coaster wheel. Major mistake. not only could we not drive straight, we still were going pretty slow. So then we rebuilt a 3rd time, this time paying attention to the distance between our wheels. We thought that if our wheels were closer together, we could spin much much faster. So we squished everything in, kept the gear ratio of 27:1, and popped on the biggest wheels. Thus, we became rip-roaring fast. sorta. we thought that it was still possible to go down to 9:1, or at least 15:1, but this is just for your future reference that it is possible to do that. We also slapped back on the servo. However, instead of using the planetary gear thingy that people use for "synchro drive," somehow we got everything to fit Very Compactly. It was a miracle. Our turning wheel, and servo mechanism basically dropped in right next to the battery (picture, Brian?), and our hippo servo plopped right on the side of our robot, and our Arm servo basically dropped right in, and fit perfectly between two lego bracers. In fact, after everything was over, the battery fit very snugly, too (we could just vertically drop it in and out). When we rebuilt our robot, it was easier to rebuild. When we rebuilt, we also paid much attention to the mounting of the motors (key), and spent a lot of time in making our electronics robust (or at least robustly made), so that we could totally rely on the code, and not have worries about the electronics as we coded. We found a neat way to mount the motors, in a gear ratio of 27:1, and did some foam tape/hot glue finnagling/lego power to mount 3 motors on one gear of one gear train for one wheel.
So, our strategy was not to be greedy, but be fast. So we would spin for the first ball and get our alignment (using distance sensors) all at the same time. Then we would align, and wall follow to get one of the opponent balls (we would sense their ball with a distance sensor, and then lower the hippo to get the ball). Then we would drive back with the ball, again, wall following, then using the distance sensors, sense when we had passed the middle block, and then immediately go into open loop, extend our arm towards the opponent side of the board, and drive through our colored line, in hopes of crashing into any robot that was trying to line follow. We knew that this would not gurantee us a win, but that the probability was high enough that we should just go with it, and not worry about it anymore. We were able to finish our run, at worst 7 seconds, and at best 5.5 seconds, depending on orientation.
How we did:
We were surprised when we made it so far into the game. In the final rounds, we went up against "Maximus," the robot that looked a lot like ours. they also had an the arm and hippo apparatus (btw, I say hippo, because the way we thought of that thing that gets the ball, is that I used to love the game Hungry Hungry Hippos. And that game gave us the idea to collect the one ball using that). Anyway, back to the final round. We ended up tying "Maximus" in double wins THREE TIMES in a row. The organizers were appalled, and the crowd was really excited. We were worried. But it was comforting to hear the little kids in the crowds yelling out to "not worry." At least they truly understood our name. In the 4th final match (we were planning on doing best 2 out of 3, but we kept tying, so both us and "Maximus" decided to go to sudden death). we finally got lucky, and won first place in the competition, with a score of 3-2. We also went undefeated through the entire competition.
We had a lot of fun, but also came with a lot of suffering. Looking back, I can't believe IAP was spent making this thing work. But overall, it was a good experience, and we both learned a lot about group dynamics, and being considerate towards one another.
More Links:
Here is a link to our code, and some more pictures we took of our robot. pictures.
Thank You's:
Jesus Christ and God, for watching over us and hearing our prayers for good team dynamics so that we would learn to be more considerate to one another, and truly not worry in this, and in all things, because He is the Creator, sovereign, and loves His creation.
Our families and parents, for supporting us always... :) Thanks.
Kirpal, Red General, and Murphy's Plow of Doom for always being in lab, and smelling nicer than everyone else. :)
And our friends for coming to support us at the rounds! It was exciting. :)
Peace and blessings,
Brian and Fred.