|
The one and only
|
|
|
The one and only
|
Welcome
The Team
6.270
The Development
The Gearbox
The Sensors
The Strategy
The Competition
Gallery
To Team One's 6.270 website. This site is dedicated to our robot called "Crash Test Dummy". The name developed as we went through the tactics of our robot. As shown further down, our robot crashes into walls all over the place in order to find it's orientation. That's where the name came from.
Cemal Akcaba akcabac@mit.edu,
Oskar Bruening ernst@mit.edu,
Jack Holloway holloway@mit.edu
The annual 6.270 competition is one of the big events at MIT. Every IAP (Independent Activity Period in January) many mabny teams try to built with a limited amount of Legos, sensors and motors an autonomous robot. This robot has to score points. The rules of the competition change every year. Teams have 3 1/2 weeks to build their robots.
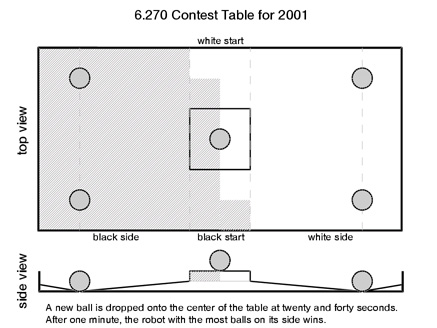
This years competition had the following setup:There are two sides, one painted in a dark blue the other in a light yellow. The robot has to figure out in the beginning which direction it stands in, which color it belongs to and then get going. Within 60 seconds it has to score as many points as possible. That means by then end of the 60 seconds it has to have as many balls in it's territory as possible. At the start there are 2 balls in each field and 1 ball in the neutral territory. If the center ball is moved, further balls are dropped.
In our first brain storming session we thought as many possible designs as possible, as for example a ramp, pushing the center ball into our field and then letting all following dropping balls also roll in out field. Then a collector robot, holding up to 4 balls in it's inside, was considered. Throughtout the competition we saw many other teams following this idea. We, however, decided to create a fast robot, taking single balls and quickly rolling them in own territory, turning around and then returning to the opponents field, collection more balls. We created 4 robots, all similar, but everytime we had differnt problems, making us create a new version everytime.
The first one was too small and the gear box was of no good. The second one broke, after some jerk hit it with it's backpack and it broke into it's components. The third one was alright, nice and compact and the gear box was of a complettely new design. However, after bumbing in too many walls while making it going straight perfectly, the gear box gave up and we were unable to repair it. So,m finally, one day before the first qualification and 1 1/2 weeks after the start of the competition, we took that one apart and created the latest version, with an awesome gear box and solid built.
We decided to got for speed and strength. The design of the gearbox is important to achieve either of those criteria, athough a trade off there does exist. Speed is produced by building a gearbox with a low ratio, meaning the high spin of the motor is only geared down by a little, so the corresponding wheel turns very fast. However, to get strength, the motorspin has to be geared down far more, and the more it's been geared down, the stronger the car. Therefore a trade off between speed and strength exists. The faster the car, the less strength and vice versa.
We decided to go with a ratio of 1:27, meaning the motors spin 27 times as fast as the wheels, which is a very low gear ratio. Among other teams ratios of 1:50 and 1:70 were common. Because of the high speed/low strength trade off, we had to make plans on how to improve the strength of the car. We decided to use as many motors as possible for powering the car. The maximum number of motors that can be controlled by the handy board is six, and so we went for three motors for each of the two driving wheels. Because of the high speed and the torque on the gears, we had actual effects of LEGO gears wearing off, and the whole gear box just breaking apart over and over again. It took a long time and quite some bracing to finally build a gearbox that could hold the torque. Below one can see what the final gearbox looked like.
Gearbox of #4 - Top Gearbox of #4 - Side
In order to be able to navigate, we had top use sensors. We tryed most of the sensors that came with the standard 6.270 set, however most of them proofed useless, either because of the speed we were going at (like the distant sensors) or because of the tactics we were using (front bumper sensors did not work well). Our final implementation only took advantage of rear bumper sensor, testing whether the back of the robot hit a wall, shaft encoders, measuering the distance we were going and whether we were moving at all (EXCELLENT results here!) and light sensors to find our orientation in the beginning.Something should be said about the orienation using light sensors. It is being said every 6.270 I believe and we will just say it again, a neat and 98% working calibration code is needed for finding orientation. We had so many troubles because of this and actually one of our losses is due to the fact that the roboto did not find the right orientation and screwed up. Afterwards we had some more ideas on what we could have done to improve the calibration, but seriously, think about it before and try it over and over again. If the orientation is wrong everything else, no matter how well programmed is useless.
The rear bumper sensor The rear light sensors The front light and bumper sensors
Our strategy was simple. We would turn towards the opponents fields, go foward, grab the first ball, by pushing it agains the wall and then closing our gate, then go backwards to our own site, kick the ball out and go to opponents side again, to collect more balls. This was supposed to happen fast, so in case we would be facing a static robot, like a ramp, moving the dropping balls to it's own field, we would simply collect them and drive them over to our place. This worked really well. At least half of the times. In 19 out of 20 cases we would get the firat ball and in our final state we usually got further balls as well.
Then the long awaited day came. After the first round on the monday before, where we had a win, we finished the robot and handed it in on wednesday for the impounding. At that point the TA's check whether everything done to the robot was in legal, etc. On thursday the big competition took place. In the 2nd round taking place in the morning we had the previously mentioned loss due to oriantation problems. However, since every robot had to have two losses in order to be out of the competition we were still in. We ended up losing the second time in the 5th round against the robot "Mini Max", one of the finallists. It was a close match, since everything worked neatly and MiniMax only won, be carrying it's load of balls into the own field withing the last three seconds of the match. That was so close. But we were happy, we had made it into the 5th round and over all the functionallity of the robot was satisfactory.
Some pictures of our robot:
#1 - Side #1 - Rear #1 - Top #2 - Side Cemal Programming Putting together our really cool arms Arm up Arm down AHHH!!! 


Taking #3 apart to build #4 Pizza break in Lab Ready.... Set.... Goooooo! Stop at the line #4 - Side #4 - Front #4 - Rear